
 言語
言語

アプリケーション業界
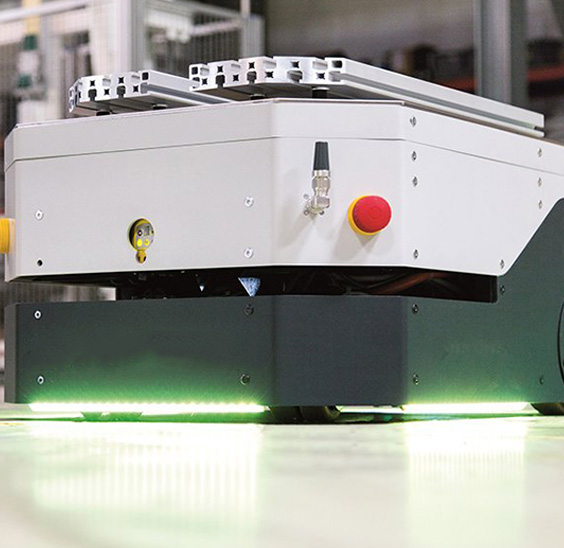
AGV
自動ロボット

レーザー切断

ロジスティクスソート

太陽光発電のパワーステーション

医療機器
AGV システムではどのようなモーターが使用されていますか? 適切な AGV 駆動モーターを選択するにはどうすればよいですか?
駆動モーターは、自律搬送車 (AGV) において最も重要な電気機械コンポーネントです。 AGV がどのように加速するか、どのくらい正確に位置決めするか、どのくらいの積載量を移動できるか、次の充電までにバッテリーがどのくらい持続するか、駆動システムのメンテナンスが必要になるまでに車両がどのくらいの時間動作するかが決まります。駆動モーターが不足していたり、指定が間違っていたりした AGV は、生産現場でのペイロードと速度の要件を満たすことができません。モーターの効率が悪いものは、物流作業が対応できるよりも早くバッテリーを消耗します。頻繁なメンテナンスが必要な駆動モーターを備えたシステムでは、その価値提案全体が信頼性の高い継続的な自律動作であるシステムに計画外のダウンタイムが発生します。
AGV システム インテグレーター、駆動コンポーネントを指定するロボティクス エンジニア、AGV プラットフォームを評価する倉庫自動化チーム、新しい AGV 車両を設計する OEM 機器開発者にとって、AGV 駆動システムで使用されるモーター テクノロジと、どのテクノロジがどのアプリケーションに適合するかを決定する仕様パラメータを理解することは、コンポーネントを適切に決定するための必須の知識です。このガイドでは、AGV 駆動モーターのタイプ、選択パラメーター、および AGV モーター アプリケーションを一般的な産業用モーター アプリケーションと区別する特定の要件について説明します。
AGV ドライブのモーター要件が一般的な産業用モーターの要件と異なる理由
AGV 駆動モーターは、ほとんどの一般的な産業用モーター アプリケーションとは異なる、要求の厳しい特有の一連の条件で動作します。
バッテリー電源。 すべての AGV はバッテリ駆動です。AC 主電源に接続せずに、DC バッテリ パック (通常は公称 24V、36V、または 48V) で動作します。これには基本的に DC 互換の駆動モーターが必要です。 AC モーターはオンボード インバーターとともに使用できますが、バッテリー駆動システムにおける DC から AC への反転による効率の低下は重大です。 DC モーター、特に BLDC モーターは、逆転ペナルティなしでバッテリー電力を直接 (または DC-DC コンバーターを通じて) 受け入れるため、有力な選択肢となります。
頻繁な起動と停止のサイクル。 AGV は、静止状態から移動速度まで加速し、ピッキングまたは預け入れポイントまで移動し、停止します。これを 1 日に何百、何千回繰り返します。駆動モーターは、過熱や過度の摩耗を発生させずにこの始動/停止サイクルに対処する必要があります。そのため、モーターの熱管理と、ブラシ付きモーターの場合は大電流の始動過渡現象を処理する整流子およびブラシ・アセンブリーが要求されます。
双方向操作。 AGV は前進と後進の両方で駆動する必要があり、機械的な衝撃を与えずに方向間をきれいに移行する必要があります。モーターとそのコントローラーは、スムーズな双方向速度制御をサポートする必要があります。ステアリングディファレンシャル AGV (左右の独立した車輪速度制御が旋回を生み出す) の場合、正確なステアリングを実現するには、2 つの駆動モーターの速度とトルクの応答を正確に一致させる必要があります。
正確な速度と位置制御。 最新の AGV、特にレーザー誘導 (LiDAR)、ビジョン誘導、または磁気トラック AGV のナビゲーション精度には、正確な速度制御が必要であり、一部のシステムでは駆動モーター エンコーダーからの正確な位置フィードバックが必要です。モーターは、速度ハンチングや不安定性を生じることなく、ペイロードおよび地形範囲全体にわたって一貫した制御された速度で動作する必要があります。
バッテリー寿命を延ばすための高効率。 バッテリー駆動の自動運転車では、モーターの効率が充電間の動作時間を直接決定します。 75% ではなく 85% の効率で動作する駆動モーター システムは、車両の動作範囲を約 13% 延長します。物流用途では、これが車両がバッテリー サイクル内でルートを完了するか、予定外の充電停止が必要になるかの違いとなる可能性があります。エネルギー効率は、AGV モーターの選択における第一級の仕様要件であり、二次的な考慮事項ではありません。
AGV 駆動システムで使用される主なモーターの種類
ブラシレス DC ギア モーター (BLDC): 主要な AGV ドライブ テクノロジー
ブラシレス DC ギア モーターは、最新の AGV システムで圧倒的に好まれている駆動モーター テクノロジーです。 BLDC モーターは、従来のブラシ付き DC モーターの機械的な整流子とブラシ アセンブリを電子整流に置き換えます。モーター コントローラーが (ホール効果センサーまたはエンコーダー フィードバックを介して) ローターの位置を読み取り、正しいシーケンスで固定子の巻線を切り替えて、物理的なブラシとの接触なしで回転を維持します。この電子整流により、AGV においてブラシ付きモーターに比べて BLDC モーターに決定的な利点がもたらされます。
ブラシの磨耗がない = ブラシのメンテナンスが不要です。 ブラシ付き DC モーターでは、整流子リングを押し付けているカーボン ブラシが動作中に継続的に摩耗します。 AGV が 3 交代の物流業務で 1 日あたり 20 時間稼働する高負荷サイクルでは、数か月以内にブラシの交換間隔に達する可能性があり、計画的なダウンタイムと交換作業が必要になります。 BLDC モーターには磨耗するブラシがありません。唯一の摩耗部品はモーターのベアリングであり、その耐用年数は数千時間と測定されています。継続的に稼働する AGV フリートにとって、ブラシのメンテナンスが不要になることは、高い運用コストと稼働時間の利点になります。
より高い効率。 BLDC モーターは通常、定格動作点で 90 ~ 95% の電気機械効率を達成しますが、同等のブラシ付き DC モーターの電気機械効率は 75 ~ 85% です。バッテリー駆動の AGV では、この効率の違いは、充電サイクルあたりの稼働時間の増加に直接つながります。
優れた熱性能。 BLDC モーターの熱は主にモーター ハウジングと直接接触しているステーター巻線で発生するため、熱放散が効率的になります。ブラシ付きモーターは、巻線と整流子/ブラシの接点の両方で熱を発生します。また、ブラシの接点はモーターの内部にあり、熱放散が効果的ではありません。 BLDC モーターは、過熱することなく、より高い連続デューティ サイクルを維持します。
正確な速度制御。 エンコーダまたはホール センサー フィードバックによる電子整流により、幅広い動作範囲にわたって厳密な閉ループ速度制御が可能になります。 AGV ナビゲーション アルゴリズムは、絶対位置検出間の推測航法位置推定のための正確な車輪速度フィードバックに依存しています。エンコーダ フィードバックを備えた BLDC モーターがこの精度を確実に実現します。
ブラシ付き DC ギア モーター: 低負荷の AGV アプリケーションにとってコスト効率が高い
ブラシ付き DC ギア モーターは、動作デューティ サイクルが低く (24 時間 365 日連続動作ではない)、可搬質量要件が控えめで、コスト重視の AGV プラットフォームでモーター コストの低減が優先される AGV アプリケーションで引き続き使用されています。小型部品の輸送、書類の配送、軽度の製造ラインのサポートなど、軽負荷の社内物流用に設計された AGV では、ブラシ付き DC モーター (整流コントローラーは不要) に必要な制御電子機器がシンプルであり、ユニットコストが低いため、ブラシのメンテナンスが必要であるにもかかわらず、BLDC の代替品よりも選択するのが正当化される可能性があります。
ブラシ付き DC モーターは、非常に高い始動トルク (一部の設計では同等サイズの BLDC モーターよりも高い) も提供します。これは、傾斜地で負荷がかかった状態で AGV を始動する場合に役立ちます。ただし、最新の BLDC モーター コントローラーは、フィールド指向の制御戦略を通じてこの高い始動トルクの動作を再現することができ、この分野におけるブラシ付きモーターの歴史的な利点が減少します。
AGV駆動輪用遊星歯車モーター
モーター要素がブラシ付き DC であるかブラシレス DC であるかに関係なく、AGV 駆動ホイールではほぼ一般的に、モーターとホイールの間に遊星歯車減速機が使用されます。遊星歯車構成は、いくつかの理由から AGV アプリケーションに推奨されるギアボックス タイプです。
遊星歯車は最高のトルク密度、つまり特定のギアボックスの外径に対して最高の出力トルクを提供します。これは、完全なモーター、ギアボックス、ホイール ユニットが車両シャーシの厳しい寸法制約内に収まる必要がある AGV ホイール アセンブリにおいて非常に重要です。遊星ギアボックスの同軸入出力アライメントにより、平歯車やウォームギア減速によって生じるオフセットを発生させずに、モーター→遊星ギアボックス→駆動輪をすべて 1 軸上に配置したコンパクトなインラインアセンブリが可能になります。
また、遊星ギアボックスは、ウォーム ギアの代替品 (比率と進角に応じて通常 50 ~ 85%) と比較して高い効率 (1 段あたり 92 ~ 97%) を実現します。これは、バッテリー効率が重要な AGV アプリケーションでは重要です。ギアボックス効率 70% で動作するウォーム ギア AGV 駆動モーターは、モーターの入力電気エネルギーの 30% をギアボックス内の熱だけで失います。これはバッテリー駆動車両にとっては容認できないペナルティです。
AGV 駆動モーター選択の主要な仕様パラメータ
| パラメータ | 一般的な AGV 仕様範囲 | なぜそれが重要なのか |
|---|---|---|
| 定格電圧 | DC24V / 36V / 48V | AGV バッテリー パックの電圧と一致する必要があります。電圧が高いほど、より低い電流でより大きな電力が得られ、ケーブル損失とモーター温度が低減されます。 |
| 定格電力 | 駆動モーターあたり 50W ~ 1,000W (車両と積載量によって異なります) | 動作環境の最も急な勾配で積載車両を加速するのに十分な値でなければなりません。パワー不足により、坂道でモーターに熱過負荷がかかる |
| ホイールでの出力速度 | 50 ~ 300 RPM (ホイールシャフト、減速後) | 車両の移動速度を決定します。ホイールの直径と目標の AGV 速度によって、必要な出力シャフト RPM、つまり必要なギア比が決まります。 |
| 連続出力トルク | 駆動モーターあたり 5 ~ 200 Nm (積載量と傾斜に応じて) | 最大積載量の AGV を定格速度で最大勾配で移動するのに必要なトルクを超える必要があります。衝撃荷重マージンに 2 倍の安全率を適用 |
| ピークトルク | 2×–3×連続トルク | 全負荷時の停止状態からの加速に必要。モーターとコントローラーは、加速ランプの間、過熱したり過電流保護が作動したりすることなく、ピークトルクを維持する必要があります。 |
| エンコーダの解像度 | 100 ~ 4096 PPR (モーター シャフトの 1 回転あたりのパルス数) | 推測航法ナビゲーションのオドメトリ精度を決定します。エンコーダの解像度が高くなると、ナビゲーション センサーからの絶対位置検出間の位置推定が向上します。 |
| 効率 | 定格動作点で全体 (モーター ギアボックス) ≥ 85% | バッテリーの動作時間を直接決定します。 BLDC プラネタリーは 90% の総合効率を達成します。ブラッシュウォームギアよりもこれを好みます (合計 60 ~ 70%) |
| IP等級 | 一般屋内物流向けの IP54 最低値。湿った環境や粉塵の多い環境向けの IP65 | AGV モーターは床レベルの汚染物質にさらされています。侵入保護が不十分であると、塵や湿気によるベアリングや巻線の早期故障につながります。 |
| デューティサイクル | S1 は 24 時間年中無休の連続稼働。 S3 1 シフト用断続 | モーターの熱定格は動作パターンと一致する必要があります。 S3 断続的使用に定格されたモーターは、連続的な S1 AGV アプリケーションで過熱します。 |
AGV 駆動モーターの必要トルクの計算方法
平面上で AGV を一定速度で駆動するために必要なトルクは、転がり抵抗を克服する必要があります。傾斜地では、重力によって勾配抵抗成分が追加されます。一般的な 2 輪駆動 AGV の計算:
車両総重量: W = (AGV風袋重量最大可搬質量) × g [ニュートン]
転がり抵抗力: F_rolling = W × μ_r、ここで、μ_r は転がり抵抗係数です (通常、滑らかなコンクリート上のゴム車輪の場合は 0.01 ~ 0.02、柔らかい床または粗い表面の場合は 0.02 ~ 0.05)。
勾配抵抗力(傾斜の場合): F_grade = W × sin(θ)、θ は勾配角度 (5% 勾配の場合、θ ≈ 2.86°、sin(θ) ≈ 0.05)
総駆動力: F_total = F_ローリング F_grade
駆動輪に必要なトルク (モーターあたり、2 つの駆動モーターを想定): T_wheel = (F_total / 2) × r_wheel、r_wheel は駆動輪の半径 (メートル単位)
必要なモータートルク: T_motor = T_wheel / (i × η)、ここで i はギア減速比、η はギアボックス効率
たとえば、総積載重量 500 kg、直径 150 mm の駆動輪、勾配 3%、効率 0.95 の 25:1 遊星ギアボックスを備えた AGV の場合、次のようになります。
- W = 500 × 9.81 = 4,905N
- F_ローリング = 4,905 × 0.015 = 73.6 N
- F_グレード = 4,905 × 0.03 = 147.2 N
- F_total = 220.8 N;モーターあたり = 110.4 N
- T_wheel = 110.4 × 0.075 = 8.28 Nm
- T_motor = 8.28 / (25 × 0.95) = 0.35 Nm 定格連続トルク
加速トルクに 2 倍の安全係数を追加します: ピーク モーター トルク要件 ≈ 0.70 Nm。 25:1 の比率で 48V で 0.70 Nm 以上のピークトルクを持つ BLDC 遊星歯車モーターは、この要件を満たします。連続トルク定格は、適切な熱マージンを備えた連続要求トルク (勾配上の最大積載量で 0.35 Nm) に対して検証する必要があります。
よくある質問
AGV のステアリング構成はモーターの選択にどのような影響を与えますか?
AGV はいくつかのステアリング構成を使用し、それぞれに異なるモーター要件があります。ディファレンシャルドライブ (2 つの独立した駆動輪、ステアリングホイールなし) は、2 つの駆動モーターを異なる速度で動作させることで旋回を生み出します。これには、両方のモーターの速度とトルクの特性が厳密に一致し、両方の車輪の差動速度を同時に指令できる調整されたモータードライバーによって制御される必要があります。三輪車のステアリング (前部に 1 つの操舵駆動輪、2 つの受動的後輪) は、独立したステアリング アクチュエータを備えた単一の駆動モーターを使用します。モーターの選択は簡単ですが、ステアリング アクチュエーターの統合を考慮する必要があります。全方向ドライブ (各コーナーのメカナムまたはオムニ ホイール) は、個別に制御される 4 つのモーターを使用し、横方向および斜め方向の動きを可能にします。モーター コントローラーは 4 チャネルの調整を処理する必要があり、モーターは動作範囲全体で優れた速度マッチング特性を備えている必要があります。
AGV 駆動モーターに推奨されるエンコーダーのタイプは何ですか?
インクリメンタル エンコーダ (直角位相 A/B 出力) は、AGV 駆動モーターの走行距離測定に最も一般的なタイプです。これらは、ナビゲーション コントローラーが車輪の移動距離と速度に変換する 1 回転あたりのパルス数を提供します。アブソリュートエンコーダは、電源投入後に原点復帰せずにコントローラが位置を知る必要があるアプリケーションで使用されることがありますが、オドメトリ (距離測定) の場合は、インクリメンタルエンコーダが標準です。標準的な遊星歯車減速比で優れたオドメトリ精度を得るには、モーター シャフトの分解能 500 ~ 1000 PPR で通常十分です。より高い解像度 (2000 ~ 4096 PPR) により、ホイール シャフトがモーター 1 回転あたりの回転のより大きな部分を移動する低レシオ システムでのオドメトリが向上します。
AGV 駆動モーターは回生ブレーキを使用できますか?
はい — AGV アプリケーションの BLDC モーター コントローラーは通常、回生ブレーキをサポートしています。回生ブレーキでは、モーターが減速中に発電機として機能し、運動エネルギーを電気エネルギーに変換してバッテリーを再充電します。回生ブレーキはバッテリー消費を削減し (特に頻繁に減速するストップアンドゴーの AGV ルートで)、ブレーキの摩耗を軽減し、機械的なブレーキの熱を発生させることなくより速い減速を可能にします。一般的な AGV アプリケーションにおける回生ブレーキのエネルギー回収効率は、加速に使用されるエネルギーの 15 ~ 30% であり、高頻度の短距離運転では意味があります。回生機能では、モーター コントローラーが双方向の電流フローをサポートし、バッテリー管理システムが過電圧保護に入らずに回生された充電電流を受け入れる必要があります。
AGV 駆動モーター 浙江省サイヤ・インテリジェント・マニュファクチャリングより
浙江才雅智能製造有限公司 、浙江省徳清市は、自律搬送車用途向けの BLDC 遊星歯車モーター、ブラシ付き DC 遊星歯車モーター、および完全な AGV 駆動モーター アセンブリを製造しています。 AGV 製品範囲は、公称バッテリ電圧 24V、36V、および 48V の統合エンコーダを備えた駆動モーター ユニットをカバーしており、フレーム サイズは直径 32mm ~ 82mm、遊星歯車減速比は 5:1 ~ 500:1 以上で、軽量小型部品輸送 AGV から重量物運搬プラットフォームまでのペイロード クラスをカバーしています。 AGV モーターのカスタム仕様 (電圧、比率、エンコーダ解像度、取り付け、IP 定格、コネクタ) は、同社の OEM/ODM 開発サービスを通じて入手できます。
駆動モーターの推奨事項と見積もりを受け取るには、AGV の仕様 (車両重量、積載量、最高速度、バッテリー電圧、ホイール直径、動作環境) をお知らせください。
関連製品: AGVプロジェクト製品 | ブラシレスDCギアモーター | 遊星歯車モーター | 精密遊星ギアボックス | ブラシ付き DC ギア モーター
関連製品
-

この6W誘導ACギアモーターは、幅広い産業および家庭用アプリケーションに適した効率的でコンパクトで信頼性の高い小型モーターです。モーターフレーム60mm x 60mmは、スペース制約の環境に簡単にインストールできます。単相110Vから3相220Vまでの範囲の電圧で使用でき、さまざまな電力システムのニーズを満たすために非常に適応性があります。 モーターのスムーズで効率的な動作を確保するた...
詳細を参照してください -

6WブラシDC Gbearモーターは、さまざまな用途に適した効率と汎用性のために設計されています。コンパクトなフレームサイズは60mm x 60mmで、タイトなスペースにシームレスに収まります。モーターは12〜90Vの電圧範囲内で動作し、さまざまな電源に適応できます。 負荷のない条件下では、モーターは3000-3200 rpmの速度を達成し、0.2-0.6aの電流を引きます。負荷が適用...
詳細を参照してください -

10WブラシDCギアモーターは、さまざまな産業および愛好家用途向けに、高性能と適応性を提供します。フレームサイズは60mm x 60mmで、このモーターは、電力を妥協することなく限られたスペースに収まるように設計されています。 12〜90Vの広い電圧範囲で動作し、さまざまな電源と制御システムに柔軟性を提供します。 無負荷条件では、モーターは3000〜3200 rpmの速度で走行し、0....
詳細を参照してください -

24Vブラシレスギアモーターは、さまざまな用途向けに設計された用途の広く効率的なモーターです。寸法は60mm x 60mmから104mm x 104mmの範囲で、このモーターはさまざまな機器サイズに収まります。 25Wから400Wの定格出力を誇っているため、光と頑丈なタスクの両方に適しています。モーターは、3000 rpmの一貫した定格速度で動作し、スムーズで信頼性の高いパフォーマンスを確保...
詳細を参照してください -

32mmブラシ付きプラネタリーギアモーターは、高トルクと正確な制御を必要とするさまざまなアプリケーション向けに設計されたコンパクトで効率的なソリューションです。直径32mmのこのモーターは、スペースがプレミアムであるがパフォーマンスを危険にさらすことができない状況に理想的に適しています。モーターは24Vの定格電圧で動作し、10〜15ワットの電力範囲を消費し、エネルギー効率が高く、堅牢なパフォ...
詳細を参照してください -

42mmブラシプラネタリーギアモーターは、正確なトルクと速度制御を必要とするさまざまなアプリケーションで広く使用されている用途の広く効率的なコンポーネントです。 0.7から1.1aの範囲の定格電流を備えたこのモーターは、エネルギー効率を維持しながら一貫したパフォーマンスを提供するように設計されています。その定格トルクは0.024〜0.029 n.mの間で低下し、負荷条件下で信頼できる動作を確...
詳細を参照してください -

32mmブラシレスプラネタリーギアモーターは、効率と信頼性を必要とするアプリケーションに最適な高性能でコンパクトなソリューションです。 24Vの定格電圧で動作し、20Wの電力を消費するこのモーターは、エネルギー効率を維持しながら堅牢な性能を提供するように設計されています。 このモーターの傑出した機能の1つは、そのブラシレスデザインであり、メンテナンスのニーズを大幅に削減し、モーターの寿...
詳細を参照してください -

42mmブラシレス惑星モーターは、精密伝達を必要とするさまざまなシナリオで広く使用されている高効率モーター製品です。このモーターの定格電流は1.3aで、定格トルクは0.048n.mです。さまざまな複雑な作業環境のニーズを満たすために、安定した強力な出力を提供できます。 モーターには、3.7〜307.54の幅広いギア比があります。ユーザーは、特定のアプリケーションに従って適切な削減比を選...
詳細を参照してください -

SPEシリーズのギアボックス、40、60、80、120、および160モデルのフランジサイズ範囲は、効率的で堅牢なパワートランスミッションソリューションを提供するように設計されています。これらのギアボックスは、丸い出力フランジを備えており、正確で信頼できるトルク伝達を必要とするさまざまなアプリケーションに適しています。 SPEシリーズは、50Wから7500Wのモーターパワーに合わせて訴訟を起こ...
詳細を参照してください -

SPFシリーズは、40mmから160mmの寸法に対応する正方出力フランジを備えています。これらのフランジは、さまざまな産業用アプリケーションで優れているように設計されており、さまざまな要件にわたって信頼できるパフォーマンスを提供します。温度耐性が-25°Cから90°Cに及ぶため、熱条件が多様な環境に適しており、寒冷熱と中程度の熱の両方で動作する回復力を確保します。 SPFシリーズの重要...
詳細を参照してください -

52mmブラシ付きプラネタリーギアモーターは、高トルクと正確な制御を必要とするさまざまなアプリケーション向けに設計されたコンパクトで効率的なソリューションです。直径52mmのこのモーターは、スペースがプレミアムであるがパフォーマンスを危険にさらすことができない状況に理想的に適しています。モーターは24Vの定格電圧で動作し、電力25ワットを消費し、エネルギー効率が高くなりながら、堅牢なパフォー...
詳細を参照してください -

62mmブラシ惑星ギアモーターは、正確なトルクと速度制御を必要とするさまざまなアプリケーションで広く使用されている用途の広く効率的なコンポーネントです。 2.5から5.5aの範囲の定格電流を備えたこのモーターは、エネルギー効率を維持しながら一貫したパフォーマンスを提供するように設計されています。その定格トルクは0.191〜0.287n.mの間で低下し、負荷条件下で信頼できる動作を確保します。...
詳細を参照してください
連絡先の詳細
- TEL: 0086-0571-86951513/86951543
- Fax: 0086-571-86040769
- E-mail: [email protected] / [email protected] / [email protected]
- オフィス:Hangzhou Saiya Transmisson Equipment Co.、Ltd
- Office Address: 部屋2201、ワニンビル、hangzhou市、Z江省
- 工場:Zhejiang Saiya Intelligent Manufacturing Co.、Ltd。
- Factory Address: No.35ビル、Zhongnan High-Tech Yunhe Zhigu Industrial Park、Xinan Town、Deqing County、Huzhou City、Zhijiang、China
あなたが興味を持っている場合
私たちの製品では、
私たちに相談してください
Copyright © Zhejiang Saiya Intelligent Manufacturing Co.、Ltd。 All Rights Reserved.
カスタムギア削減モーターサプライヤー
